What is Mesh and what are the types of Meshing
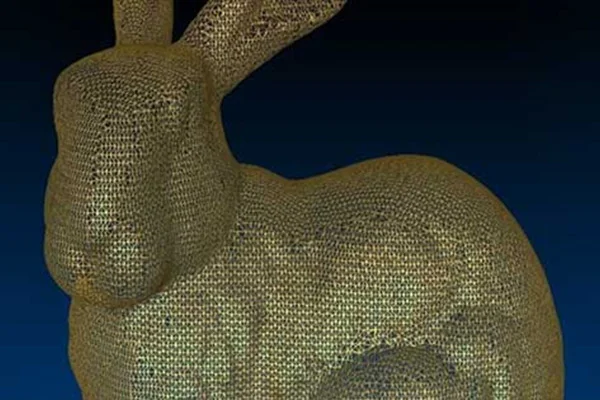
Table of content Types of Meshing Types of Meshing as per Grid Structure For those acquainted with mechanical design and reverse engineering, they can testify to the fact that the road to a new product design involves several steps. In reverse engineering, the summary of the entire process involves scanning, point cloud generation, meshing, computer-aided designing, prototyping and final production. This section covers a very crucial part of the process — Meshing or simply put, Mesh. To put a simple definition, a mesh is a network that constitutes of cells and points. Mesh generation is the practice of converting the given set of points into a consistent polygonal model that generates vertices, edges and faces that only meet at shared edges. It can have almost any shape in any size. Each cell of the mesh represents an individual solution, which when combined, results in a solution for the entire mesh. Mesh is formed of facets which are connected to each other topologically. The topology is created using following entities: These include: Types of Meshing Meshes are commonly classified into two divisions, Surface mesh and Solid mesh. Let us go through each section one by one. Surface MeshA surface mesh is a representation of each individual surface constituting a volume mesh. It consists of faces (triangles) and vertices. Depending on the pre-processing software package, feature curves may be included as well. Generally, a surface mesh should not have free edges and the edges should not be shared by two triangles. The surface should ideally contain the following qualities of triangle faces: The surface mesh generation process should be considered carefully. It has a direct influence on the quality of the resulting volume mesh and the effort it takes to get to this step. Solid Mesh Solid mesh, also known as volume mesh, is a polygonal representation of the interior volume of an object. There are three different types of meshing models that can be used to generate a volume mesh from a well prepared surface mesh. The three types of meshing models are as follows: Once the volume mesh has been built, it can be checked for errors and exported to other packages if desired. Types of Meshing as per Grid Structure A grid is a cuboid that covers entire mesh under consideration. Grid mainly helps in fast neighbor manipulation for a seed point. Meshes can be classified into two divisions from the grid perspective, namely Structured and Unstructured mesh. Let us have a look at each of these types. Structured Mesh Structured meshes are meshes which exhibits a well-known pattern in which the cells are arranged. As the cells are in a particular order, the topology of such mesh is regular. Such meshes enable easy identification of neighboring cells and points, because of their formation and structure. Structured meshes are applied over rectangular, elliptical, spherical coordinate systems, thus forming a regular grid. Structured meshes are often used in CFD. Unstructured Mesh Unstructured meshes, as the name suggests, are more general and can randomly form any geometry shape. Unlike structured meshes, the connectivity pattern is not fixed hence unstructured meshes do not follow a uniform pattern. However, unstructured meshes are more flexible. Unstructured meshes are generally used in complex mechanical engineering projects. Get access to our mesh tools library today Mesh Tools library offers a comprehensive set of operation for meshes for all your needs. Developed in C++, this library can be easily integrated in to your product. To learn more,
Read More
Point Cloud Operations
No output is always perfect no matter how much the technology has evolved. Even though point cloud generation has eased up manufacturing process, it comes with its own anomaly. Generally, a point cloud data is accompanied by Noises and Outliers. Noises or Noisy data means the data information is contaminated by unwanted information; such unwanted information contributes to the impurity of the data while the underlying information still dominates. A noisy point cloud data can be filtered and the noise can be absolutely discarded to produce a much refined result. If we carefully examine the image below, it illustrates a point cloud data with noises. The surface area is usually filled with extra features which can be eliminated. After carrying out Noise Reduction process, the image below illustrates the outcome, which a lot smoother data without any unwanted elements. There are many algorithms and processes for noise reduction. Outlier, on the contrary, is a type of data which is not totally meaningless, but might turn out to be of interest. Outlier is a data value that differs considerably from the main set of data. It is mostly different from the existing group. Unlike noises, outliers are not removed outright but rather, it is put under analysis sometimes. The images below clearly portray what outliers are and how the point cloud data looks like once the outliers are removed. Point Cloud Decimation We have learned how a point cloud data obtained comes with noise and outliers and the methods to reduce them to make the data more executable for meshing. Point cloud data undergoes several operations to treat the anomalies existing within. Two of the commonly used operations are Point Cloud Decimation and Point Cloud Registration. A point cloud data consists of millions of small points, sometimes even more than what is necessary. Decimation is the process of discarding points from the data to improve performance and reduce usage of disk. Decimate point cloud command reduces the size of point clouds. The following example shows how a point cloud underwent decimation to reduce the excess points. Point Cloud Registration Scanning a commodity is not a one step process. A lot of time, scanning needs to be done separately from different angles to get views. Each of the acquired data view is called a dataset. Every dataset obtained from different views needs to be aligned together into a single point cloud data model, so that subsequent processing steps can be applied. The process of aligning various 3D point cloud data views into a complete point cloud model is known as registration. The purpose is to find the relative positions and orientations of the separately acquired views, such that the intersecting regions between them overlap perfectly. Take a look at the example given below. The car door data sets have been merged to get a complete model.
Read More
Mesh Generation Algorithms
Table of content FAQs Algorithm methods for Quadrilateral or Hexahedral Mesh Algorithm methods for Triangular and Tetrahedral Mesh Mesh is the various aspects upon which a mesh can be classified. Mesh generation requires expertise in the areas of meshing algorithms, geometric design, computational geometry, computational physics, numerical analysis, scientific visualization, and software engineering to create a mesh tool. FAQs Over the years, mesh generation technology has evolved shoulder to shoulder with increasing hardware capability. Even with fully automatic mesh generators, there are many cases where the solution time is less than the meshing time. Meshing can be used for a wide array of applications; however, the principal application of interest is the finite element method. Surface domains are divided into triangular or quadrilateral elements, while volume domain is divided mainly into tetrahedral or hexahedral elements. A meshing algorithm can ideally define the shape and distribution of the elements. A vital step of the finite element method for numerical computation is mesh generation algorithms. A given domain is to be partitioned into simpler ‘elements.’ There should be a few elements, but some domain portions may need small elements to make the computation more accurate. All elements should be ‘well-shaped.’ Let us walk through different meshing algorithms based on two common domains: quadrilateral/hexahedral mesh and triangle/tetrahedral mesh. Algorithm methods for Quadrilateral or Hexahedral Mesh Grid-Based MethodThe grid-based method involves the following steps: Medial Axis MethodThe medial axis method involves an initial decomposition of the volumes. The technique involves a few steps as given below: Plastering methodPlastering is the process in which elements are placed, starting with the boundaries and advancing towards the center of the volume. The steps of this method are as follows: Whisker Weaving MethodWhisker weaving is based on the spatial twist continuum (STC) concept. The STC is the dual of the hexahedral mesh, represented by an arrangement of intersecting surfaces that bisects hexahedral elements in each direction. The whisker weaving algorithm can be explained in the following steps: Paving MethodThe paving method has the following steps to generate a quadrilateral mesh: Mapping Mesh MethodThe Mapped method for quad mesh generation involves the following steps: Algorithm methods for Triangular and Tetrahedral MeshQuadtree Mesh MethodThe quadtree mesh method recursively subdivided a square containing the geometric model until the desired resolution is reached. The steps for two-dimensional quadtree decomposition of a model are as follows: Delaunay Triangulation MethodA Delaunay triangulation for a set P of discrete points in the plane is a triangulation DT such that no points in P are inside the circum-circle of any triangles in DT. The steps of construction Delaunay triangulation are as follows: Delaunay Triangulation maximizes the minimum angle of all the triangle angles and tends to avoid skinny triangles. Advancing Front MethodAnother famous family of triangular and tetrahedral mesh generation algorithms is the advancing front or moving front method. The mesh generation process is explained in the following steps: Spatial Decomposition MethodThe steps for the spatial decomposition method are as follows: Sphere Packing MethodThe sphere packing method follows the given steps: Get access to our mesh tools library today Mesh Tools library offers a comprehensive set of operation for meshes for all your needs. Developed in C++, this library can be easily integrated in to your product. To learn more,
Read More
Mesh Quality
The quality of a mesh plays a significant role in the accuracy and stability of the numerical computation. Regardless of the type of mesh used in your domain, checking the quality of your mesh is a must. The ‘good meshes’ are the ones that produce results with fairly acceptable level of accuracy, considering that all other inputs to the model are accurate. While evaluating whether the quality of the mesh is sufficient for the problem under modeling, it is important to consider attributes such as mesh element distribution, cell shape, smoothness, and flow-field dependency. Element Distribution It is known that meshes are made of elements (vertices, edges and faces). The extent, to which the noticeable features such as shear layers, separated regions, shock waves, boundary layers, and mixing zones are resolved, relies on the density and distribution of mesh elements. In certain cases, critical regions with poor resolution can dramatically affect results. For example, the prediction of separation due to an adverse pressure gradient depends heavily on the resolution of the boundary layer upstream of the point of separation. Cell Quality The quality of a cell has a crucial impact on the accuracy of the entire mesh. The quality of cell is analyzed by the virtue of three aspects: Orthogonal quality, Aspect ratio and Skewness. Orthogonal Quality: An important indicator of mesh quality is an entity referred to as the orthogonal quality. The worst cells will have an orthogonal quality close to 0 and the best cells will have an orthogonal quality closer to 1. Aspect Ratio: Aspect ratio is an important indicator of mesh quality. It is a measure of stretching of the cell. It is computed as the ratio of the maximum value to the minimum value of any of the following distances: the normal distances between the cell centroid and face centroids and the distances between the cell centroid and nodes. Skewness: Skewness can be defined as the difference between the shape of the cell and the shape of an equilateral cell of equivalent volume. Highly skewed cells can decrease accuracy and destabilize the solution. Smoothness Smoothness redirects to truncation error which is the difference between the partial derivatives in the equations and their discrete approximations. Rapid changes in cell volume between adjacent cells results in larger truncation errors. Smoothness can be improved by refining the mesh based on the change in cell volume or the gradient of cell volume. Flow-Field Dependency The entire effects of resolution, smoothness, and cell shape on the accuracy and stability of the solution process is dependent upon the flow field being simulated. For example, skewed cells can be acceptable in benign flow regions, but they can be very damaging in regions with strong flow gradients. Correct Mesh Size Mesh size stands out as one of the most common problems to an equation. The bigger elements yield bad results. On the other hand, smaller elements make computing so long that it takes a long amount of time to get any result. One might never really know where exactly is the mesh size is on the scale. It is important to consider chosen analysis for different mesh sizes. As smaller mesh means a significant amount of computing time, it is important to strike a balance between computing time and accuracy. Too coarse mesh leads to erroneous results. In places where big deformations/stresses/instabilities take place, reducing element sizes allow for greatly increased accuracy without great expense in computing time.
Read More